
コマツとトヨタ自動車は2023年5月17日、鉱山現場のライトビークル(ピックアップトラックなどの小型車)の自動化を目指し、無人ダンプトラック運行システム(Autonomous Haulage System/AHS)上で自動走行するライトビークル(Autonomous Light Vehicle/ALV)の開発で協業を開始すると発表した。
鉱山現場において、コマツ製無人ダンプトラックとトヨタ製ALVを、コマツのAHS管制下で協調制御することで、無人ライトビークルの安全運行、人的ミスの防止、無人ダンプトラックの減速時間(ダウンタイム)削減を図る。
文/トラックマガジン「フルロード」編集部
写真/トヨタ自動車
鉱山オペレーション全体の自動化/自律化を推進

鉱山現場では、生活や産業に必要な鉱物やエネルギー資源の安定供給を行なうため長時間稼働が求められており、厳しい自然環境下の過酷な労働条件などから、オペレーターの人材不足が課題となっている。
また、多くの機械が稼働している鉱山現場では、さらなる安全性向上のため、人的ミスによる事故の削減も求められている。
コマツは2008年に世界で初めてAHSを商用導入し、現在世界5カ国22鉱山で650台超が稼働。鉱山現場ではAHS管制下の無人ダンプトラックと、鉱山内の作業員輸送や保守点検に携わる有人ライトビークルが混在しており、人的ミスによる衝突を避けるため、すれ違い時に無人ダンプトラックを減速/停止させる仕組みなどを取り入れており、オペレーション上の課題を抱えていた。
今回、両社はこの課題を解決することが急務であるという認識を共有し、鉱山オペレーション全体の自動化/自律化推進に共同で取り組む。
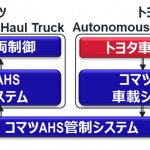
具体的には、コマツがAHSの管制システム上にALV用管理プログラムを新たに開発。トヨタは乗用車で培った自動運転技術を応用し、AHSの管制システムからの指令により自動で走行するALVを開発する。
そして、無人ダンプトラックとALVを、コマツのAHS管制下で協調制御して自動走行させることで、鉱山現場のさらなる安全性/生産性向上を目指す。
現在はコンセプト車両で試験を実施しており、2024年1月頃を目処に、実際の鉱山現場で実証実験を開始する予定だ。
【画像ギャラリー】コマツの管制システムで無人ダンプとALVを協調制御!! システムの構築イメージをチェック!!(2枚)画像ギャラリー















コメント
コメントの使い方