
経産省と国交省の委託事業「RoAD to the L4」プロジェクトにおける主題の1つ「高速道路における高性能トラックの実用化に向けた取り組み」に参画するいすゞ、日野、三菱ふそう、UDトラックスの大型4社は、同プロジェクトの新たなステップとして、新東名高速道路での自動運転大型トラックを用いた走行実証を11月6日より開始した。
文/トラックマガジン「フルロード編集部」、写真・図/いすゞ自動車・日野自動車・フルロード編集部
新東名で大型トラックを用いた自動運転技術の公道実証を開始
自動運転レベル4の先進モビリティサービスの実現・普及を目指す経済産業省と国土交通省の委託事業「RoAD to the L4」プロジェクトは、「人の移動」と「物の移動」に関するものを4つのテーマに分類し、各分野での取り組みを進めている。
このうち「物の移動」は「テーマ3」に分類し、限定エリア(自動運転レベル4は特定の限定された領域において自動運行装置が運転操作の全部を代替する状態と定義)として高速道路を主体とする幹線輸送における自動運転トラックの社会実装を目指す「高速道路における高性能トラックの実用化に向けた取り組み」を掲げる。
これまでの「テーマ3」の取り組みとしては、プロジェクトの受託者である豊田通商、先進モビリティ、日本工営、みずほリサーチ&テクノロジーズの4社と、参画する大型4社および物流事業者をはじめとする関係者とともに、後続車の運転席を無人とした状態でのトラックの隊列走行技術を実現化(トラック隊列走行の社会実装に向けた実証:2016〜2020年度)してきた。
また、現在実施中の取り組みにおいては、高速道路周辺の物流施設やサービスエリア・パーキングエリアなどの中継エリア間における単独での無人走行の実現を目指し、その際に必要な外部インフラ機器からの支援、監視・管理などの運用、車両機能の検証を行っている。
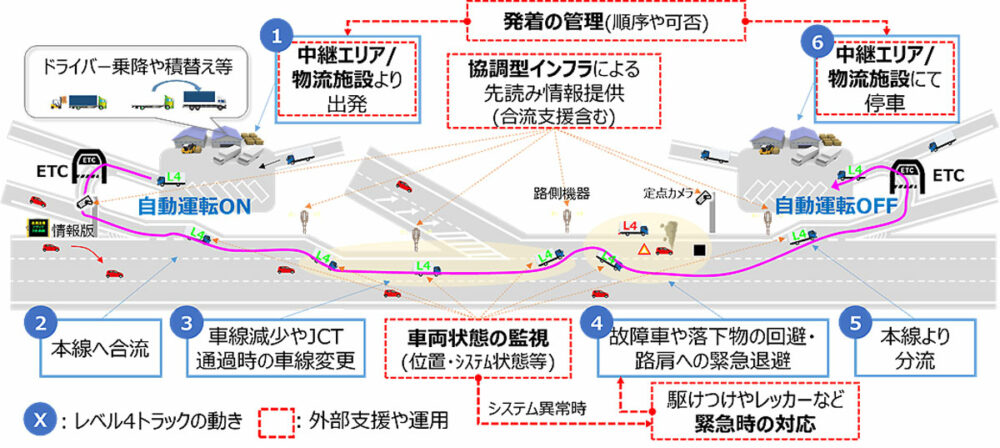
今回の公道実証は、この取り組みの新たなステップとして新東名高速道路の駿河湾沼津サービスエリア~浜松サービスエリア間において、自動運転を社会実装する際に必要となる、複数の機能の確認や検証を個別に行なうというもの。
具体的には、出発・到着地点において自動で発車・駐車を行なう自動発着システムや、緊急時に停止するための制動機能をはじめ、道路周辺に設置されているITSスポットなどの路側機器から発信される故障車や落下物情報等の有用性、走行時の遠隔監視機能などを確認・検証する。
また、今回の実証における評価結果を踏まえ、本プロジェクトの最終年度となる2025年度には、サービスエリアでの発車から本線の合流・車線変更、目的地点への駐車までを、より実際の走行に近いカタチで検証する見込みだ。
さらに今後は、経済産業省が主導する「デジタルライフライン全国総合整備計画」におけるアーリーハーベストプロジェクト「自動運転サービス支援道の設定」の1つである、自動運転車優先レーンを活用した実証実験を実施する予定となっている。
いすゞとUDトラックスの取り組み
いっぽう、いすゞ・UDトラックスは今回の実証において、両社の取り組みを発表。
両社の実証では、大型トラック「ギガ」車両総重量(GVW)25トンの6×2モデルをベースに、自車の位置を推定する「GNSS(衛星測位システム)」、車両の挙動を検知する「IMU(慣性計測ユニット)」、前方・側方の物体を検知する「ミリ波レーダー」、車両周辺360°をスキャンする「LiDAR」などの高性能センサーを搭載した自動運転レベル4トラックを各社1台ずつ使用。
この車両を用いて、新東名高速道路の駿河湾沼津サービスエリア~浜松サービスエリア間において、中継エリアの自動発着を模擬したSA/パーキングエリア(PA)における自動発着、インフラ協調の先読み情報支援(非突発情報/突発情報)、走行時の遠隔監視機能など、自動運転を社会実装する際に必要となる複数の機能の確認・検証を行なうとしている。


いすゞグループは2024年4月に公表した中期経営計画「ISUZU Transformation – Growth to 2030(IX)」において、自動運転ソリューションを新事業の柱として確立することを掲げている。
この「IX」では2027年度から日本・北米を起点に自動運転レベル4のトラック・バス事業を開始することを目指しており、昨年末より、自動運転の先進技術を有するパートナー4社との協業を推進し、社会実装に向けた動きを加速させている。
2027年度の自動運転レベル4トラックの事業化にあたっては、手始めにグループの自社物流網である栃木県から中部・関西などの補給部品倉庫間で、自動運転レベル4トラックの実現を目指している。
「RoAD to the L4」プロジェクトの自動運転トラックをギャラリーでチェック(5枚)画像ギャラリー




















コメント
コメントの使い方